I am Viki (VN), a freelance software architect experienced in building solutions involving software systems, artificial intelligence, computer clusters, and embedded systems. I have designed solutions in industries and domains including Automotive, IoT, Computer Networking, Cloud Technologies, and Robotics. I hold a Master's degree in Computer Science and Robotics from Germany. My GitHub repository [ Ref]
and this website document the solutions I have developed until now.
Expertise
I have built software applications and embedded solutions from scratch and improved existing systems. My work includes the design and development of embedded robotic sensor modules
[Ref: 1, 2, 3, 4];
Artificial Intelligence applications [Ref: 1, 2, 3, 4];
applications for embedded systems [Ref: 1, 2];
Linux applications and libraries [Ref: 1, 2, 3, 4];
bare-metal and virtual computing cluster infrastructure deployment and management [Ref: 1, 2, 3];
distributed storage infrastructure deployment and management [Ref: 1, 2, 3];
IoT solutions
[Ref: 1, 2];
and containerized Docker applications [Ref: 1, 2];
One of the solutions I developed is currently used in around 10,000 automotive devices in Europe [Ref].
Skills
I have wide experience in computing and its interdisciplinary areas, including sequential, concurrent, and parallel programming; computer networking; Linux-based application development[Ref: 1, 2, 3, 4, 5, 6],
and Linux device-driver development; Linux boot-time optimization; Application containerization with Docker [Ref: 1, 2];
AI model integration and AI application development (CNN, XAI) [Ref: 1, 2, 3, 4];
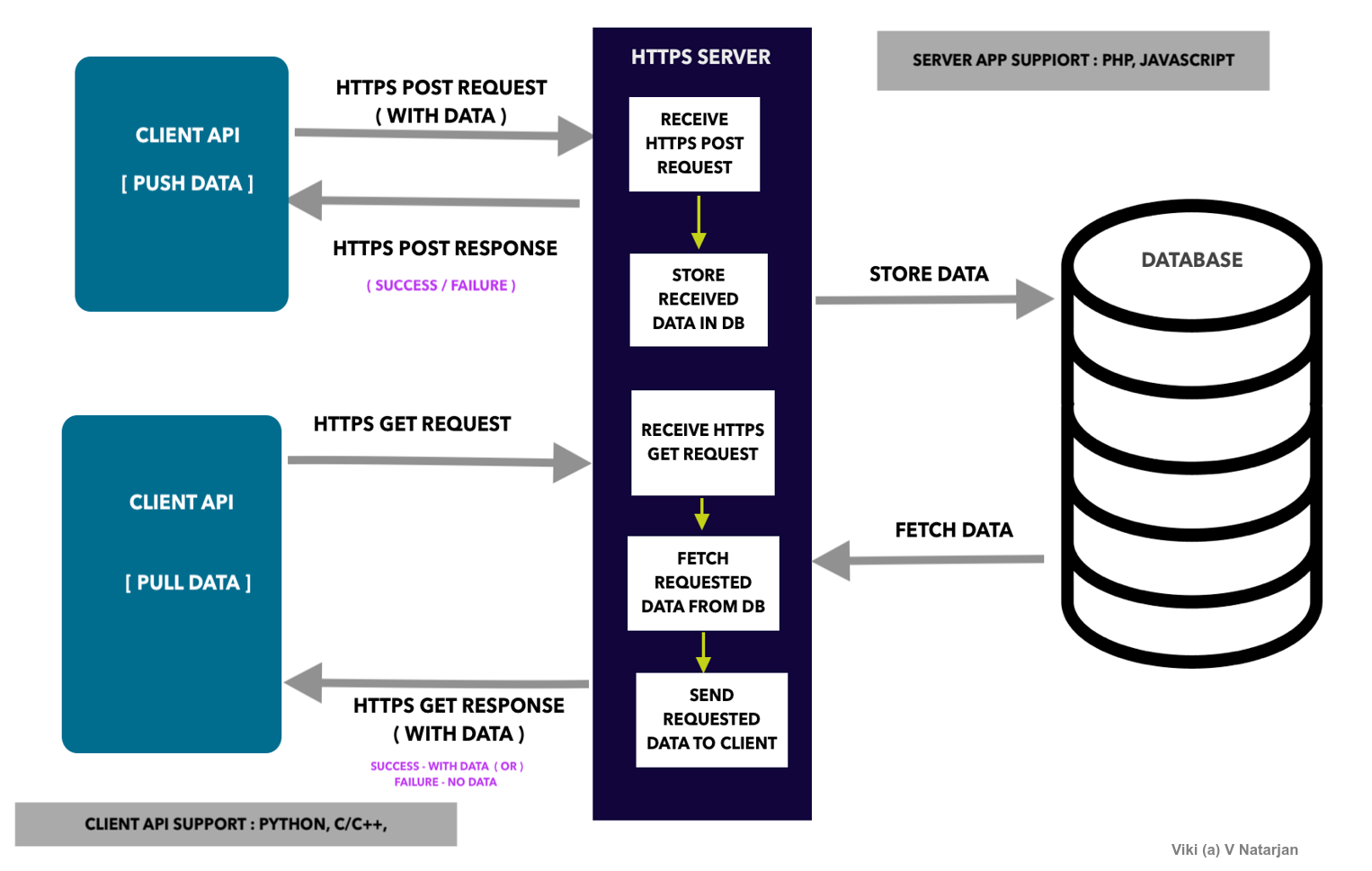
and embedded firmware development. I have developed solutions involving OSI communication protocols, including TCP/IP, MQTT, and SSH [Ref: 1, 2],
as well as hardware interfaces such as SPI and I²C [Ref: 1, 2, 3, 4].
Alongside software development, I have hands-on experience designing embedded sensor modules and controllers using KiCAD and Eagle
[Ref: 1, 2, 3, 4],
and I also work with CAD tools such as Solid Edge and FreeCAD [Ref].
Professional Experience
I have more than 14 years of experience in the software industry, including nearly a decade at a well-known computer networking company based in California. For over five years, I have worked as a consulting software architect and manager, supporting clients across Europe and the UK. I have collaborated with and led engineers from diverse cultural and professional backgrounds, including teams from France, the UK, Russia, and South Asia.
Achievements
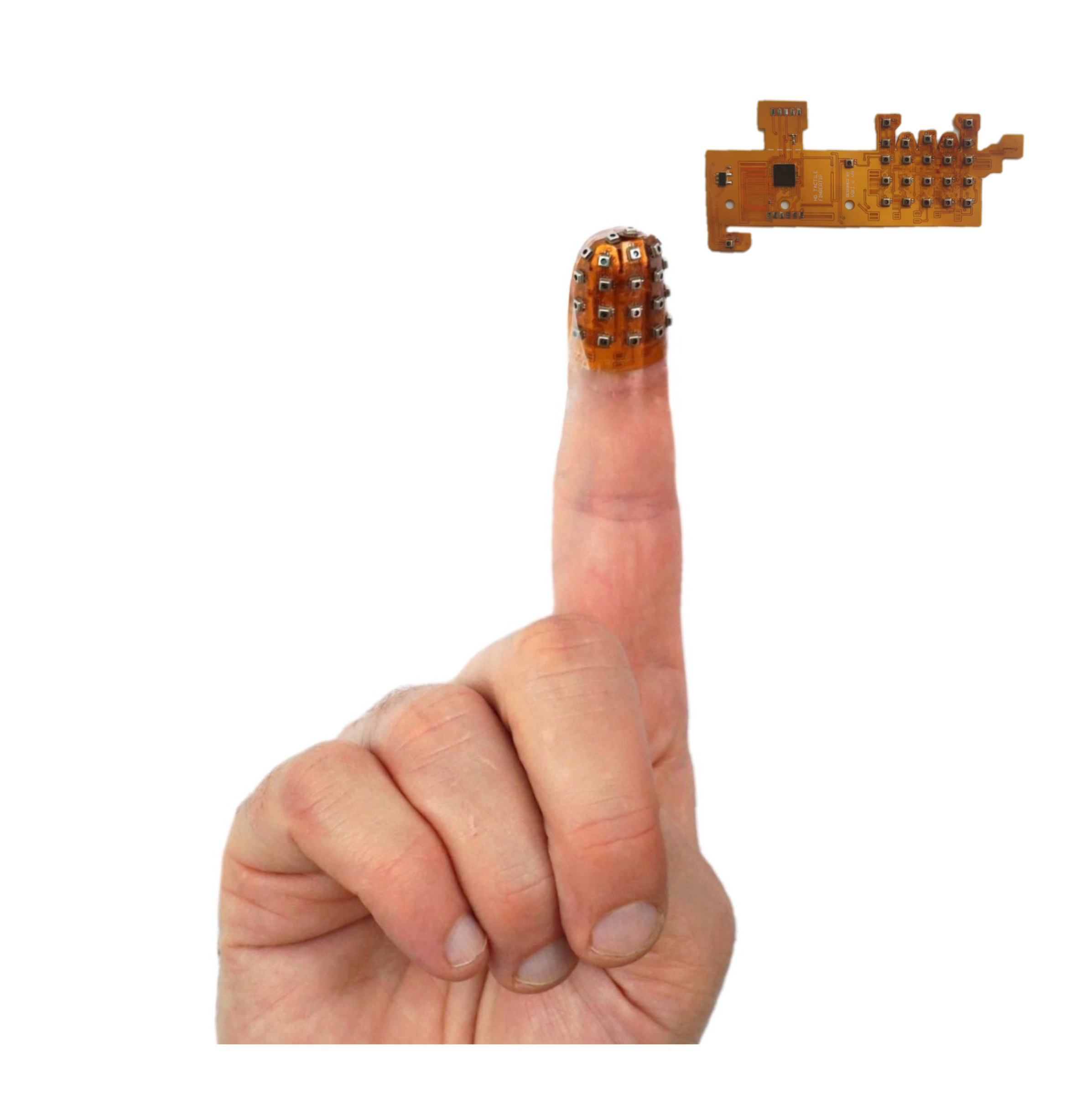
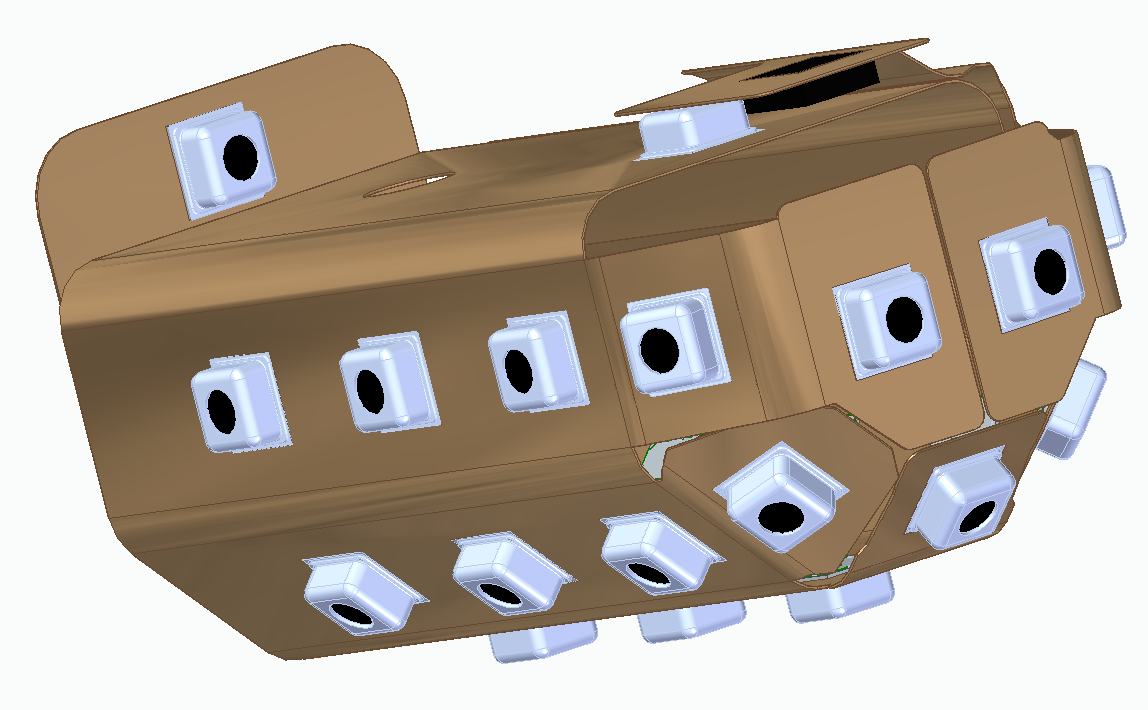
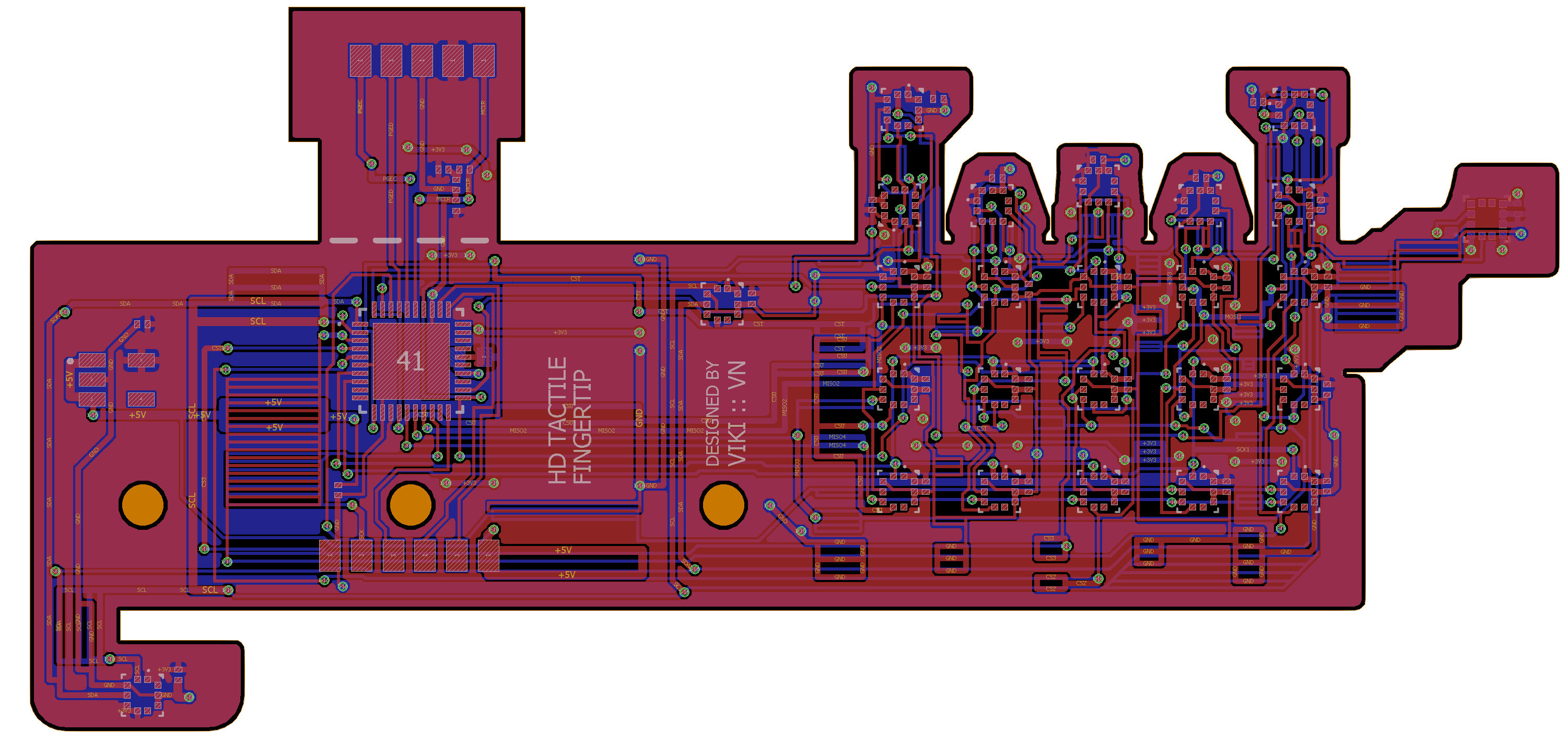
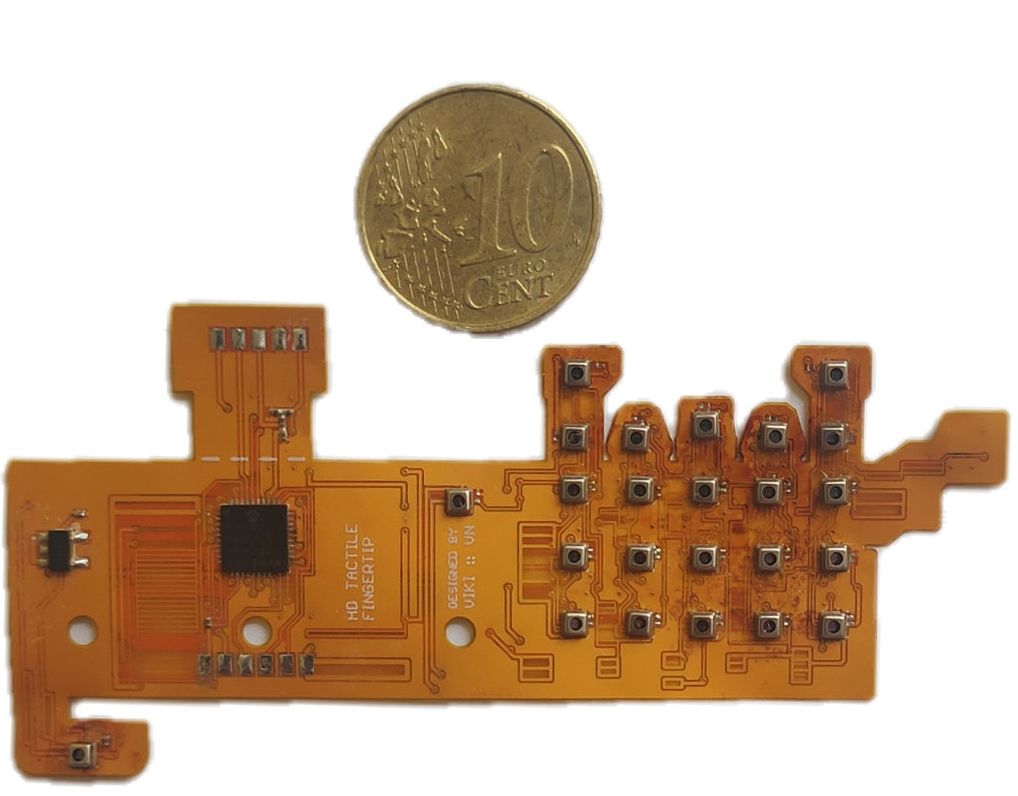
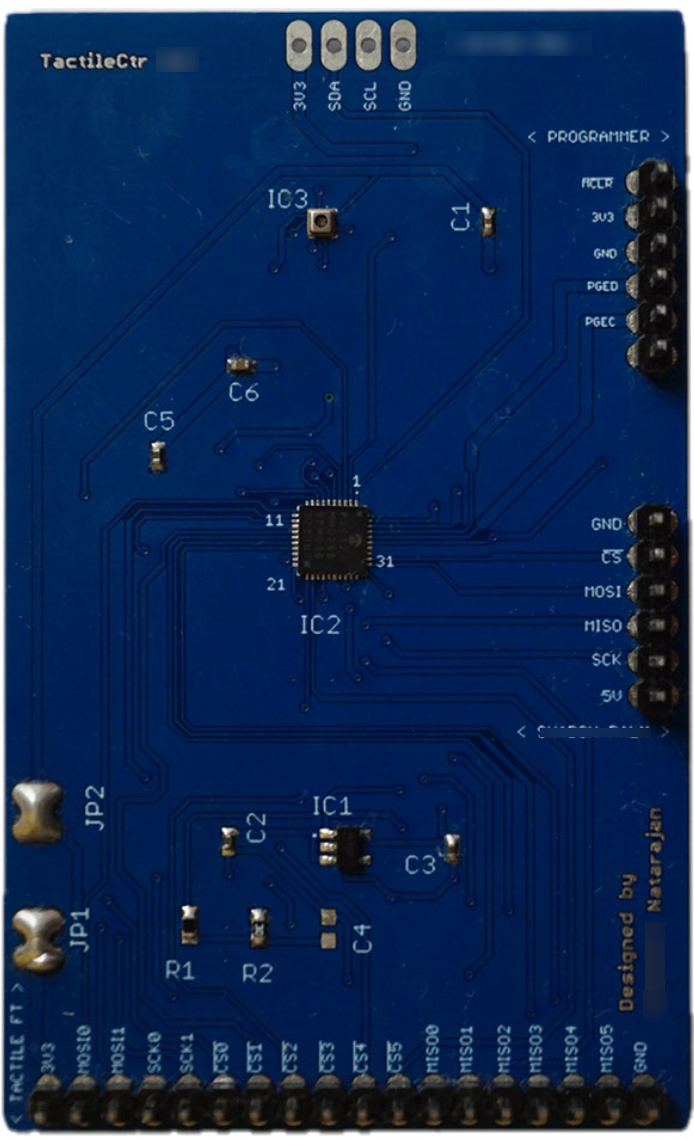
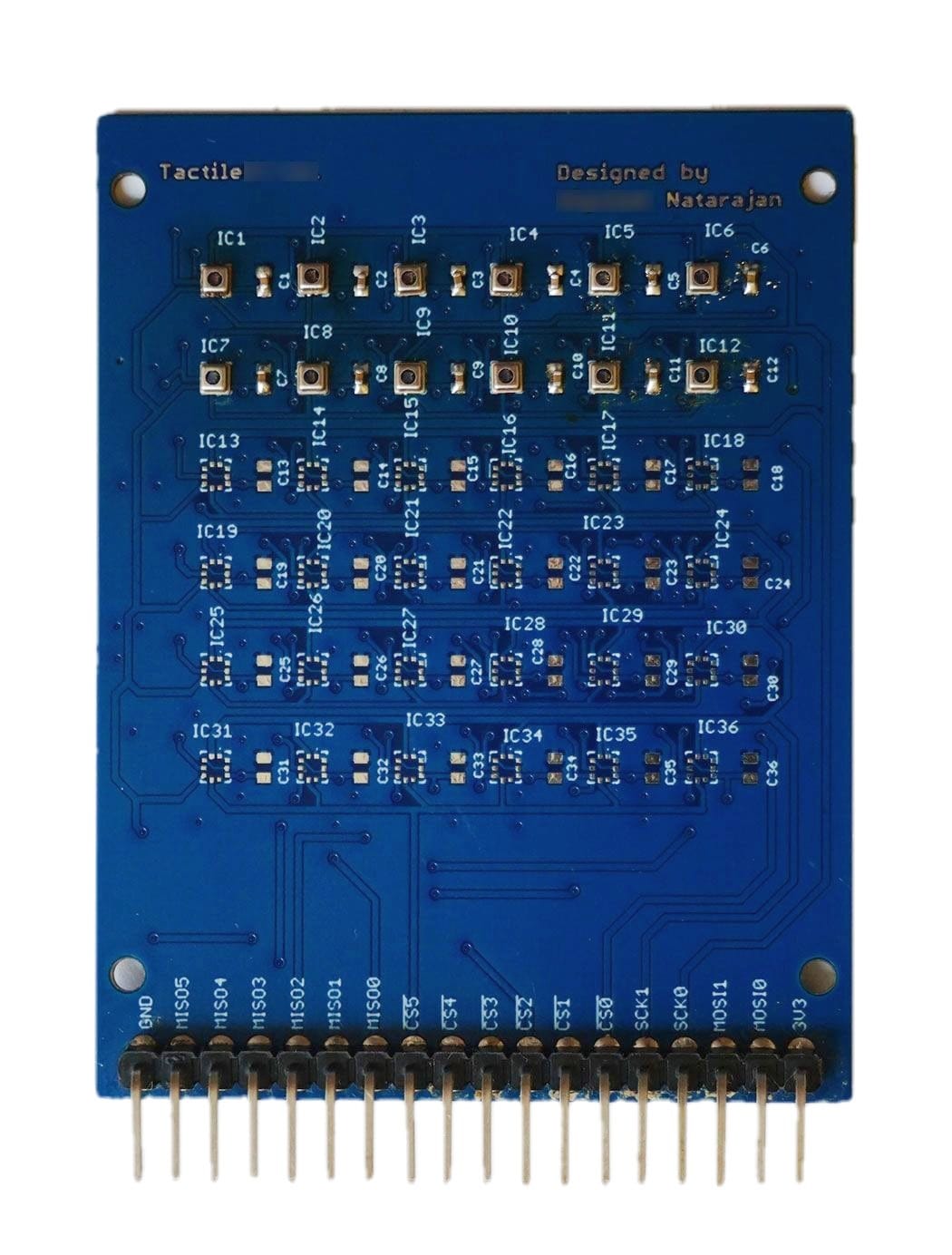
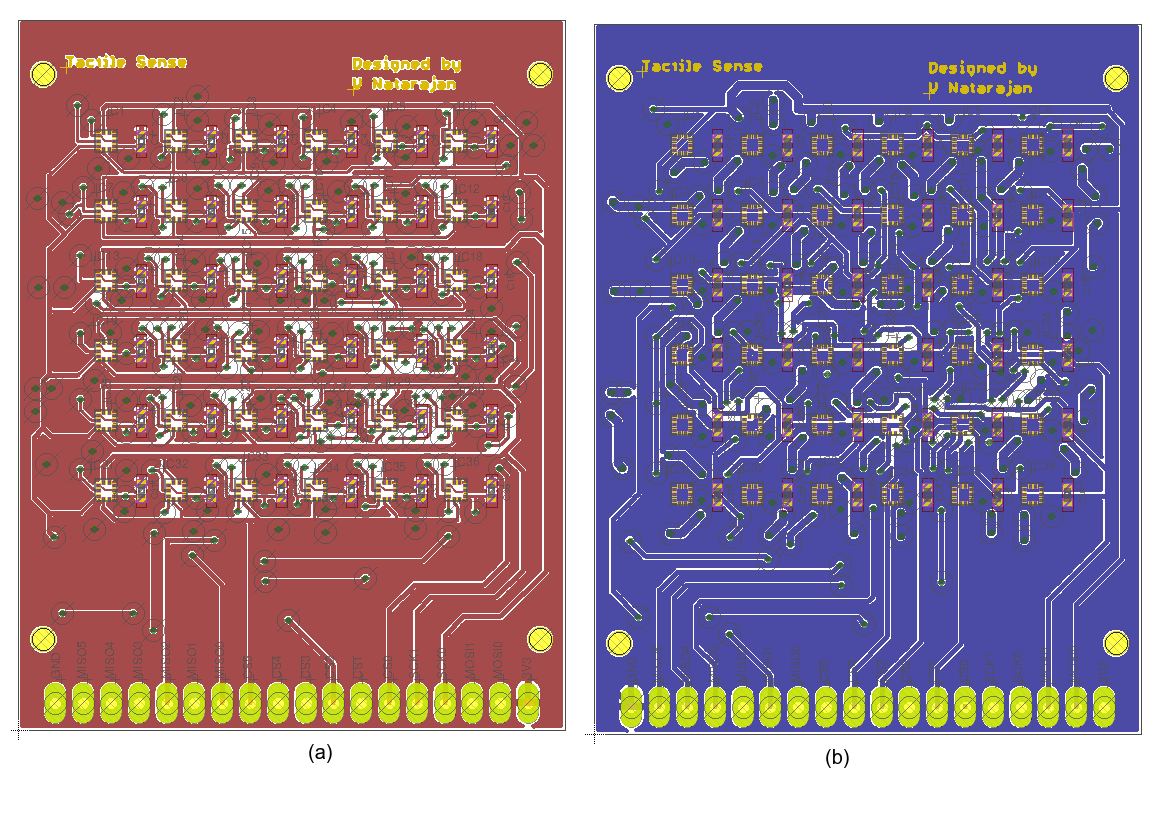
One of my most demanding and rewarding achievements is the development of a high-density tactile fingertip module
[Ref]
from scratch for humanoid robots. This project involved complete CAD modeling, electronics design, and embedded firmware development, giving me a full understanding of building a solution across three areas: computing, electronics, and mechanical design. Beyond engineering, the project taught me how to work with manufacturers, optimize costs, handle local taxation, and manage all practical steps required to produce the final sensor module.
Home Lab
I maintain a home lab equipped with essential tools, including a small LAN rack with interconnected Linux bare-metal clusters running virtual machines and Docker containers, embedded GPU modules for AI experiments, and general-purpose embedded microcontroller and microprocessor modules based on ARM, ATMEL, PIC and STM. I also have embedded hardware assembly and testing equipment, such as a soldering station, surface-mount tools, logic analyzer, oscilloscope, and a 3D printer.
In my home lab, I have created over 40 open-source projects, ranging from embedded hardware and AI applications to over-the-air update utilities, Linux tools, and sensor modules. A few of the libraries and solutions I developed are still in use in the field by my previous employers. All of these projects are documented on my GitHub[Ref].
Tools I Use Regularly
For software development, I primarily write in C [Ref: 1, 2, 3, 4],
Python [Ref: 1, 2],
and Bash [Ref: 1, 2, 3, 4, 5, 6],
and have experience with Rust, Go [Ref],
AWK, PHP [Ref: 1, 2],
and JavaScript [Ref: 1, 2, 3, 4]. For embedded hardware module design, I work with Eagle and KiCAD [Ref: 1, 2, 3, 4].
For network protocol debugging, I use Wireshark and logic analyzers, and for Linux application crash analysis, I use GDB. For CAD modeling, I work with Solid Edge and FreeCAD[Ref].
I have good hands-on experience with all of these tools.