High-Density Tactile Sensing Artificial Fingertip for Humanoids and Prosthetics

Figure 1
This project focuses on the design and development of a high-density tactile fingertip module intended for humanoid robot and prosthetic hand applications. The module is capable of measuring pressure exerted on its surface through 22 individual pressure sensors distributed across the fingertip area. It is developed using Flexible Printed Circuit Board (Flex-PCB) technology.
In this project, an origami technique is employed to fold a flat, paper-like flexible tactile sensing module into a three-dimensional shape that mimics the form of a human fingertip. Sensor data acquisition is handled by an onboard 32-bit, low-power microcontroller, and the module communicates using the SPI protocol.
In this project, an origami technique is employed to fold a flat, paper-like flexible tactile sensing module into a three-dimensional shape that mimics the form of a human fingertip. Sensor data acquisition is handled by an onboard 32-bit, low-power microcontroller, and the module communicates using the SPI protocol.
In this project, an origami technique is employed to fold a flat, paper-like flexible tactile sensing module into a three-dimensional shape that mimics the form of a human fingertip. Sensor data acquisition is handled by an onboard 32-bit, low-power microcontroller, and the module communicates using the SPI protocol.
The development of this module presented a number of challenges, particularly in mechanical design and electronics. Prior to this project, I had limited experience with mechanical Computer-Aided Design (CAD). I had to learn how to design both mechanical structures and electronic schematics, as well as manage the manufacturing and integration processes.
Despite these challenges, a functional prototype of the tactile fingertip was developed. While the current version is not yet optimized for production, it is capable of capturing tactile data. Ongoing work includes further optimization of the design, data collection, and analysis.
The dimensions of the fingertip module closely match those of a typical human fingertip, enabling applications in humanoid robots and prosthetic systems.
CAD Model
Animation:
The animated CAD model on the left shows the structural design and assembly concept of the high-density tactile fingertip module.
The model was created using Siemens Solid Edge. The sheet metal environment was used to design the foldable flexible-PCB geometry,
while the part environment was used to integrate additional components such as pressure sensors and the onboard microcontroller.
Board Layout
The schematics and board layout of the tactile fingertip module were designed using Autodesk Eagle EDA. It was a challenging task, as a large number of vias had to be managed within a very small area. The board layout includes approximately 218 vias on a two-layer flexible PCB, with dimensions around 32 mm × 74 mm.
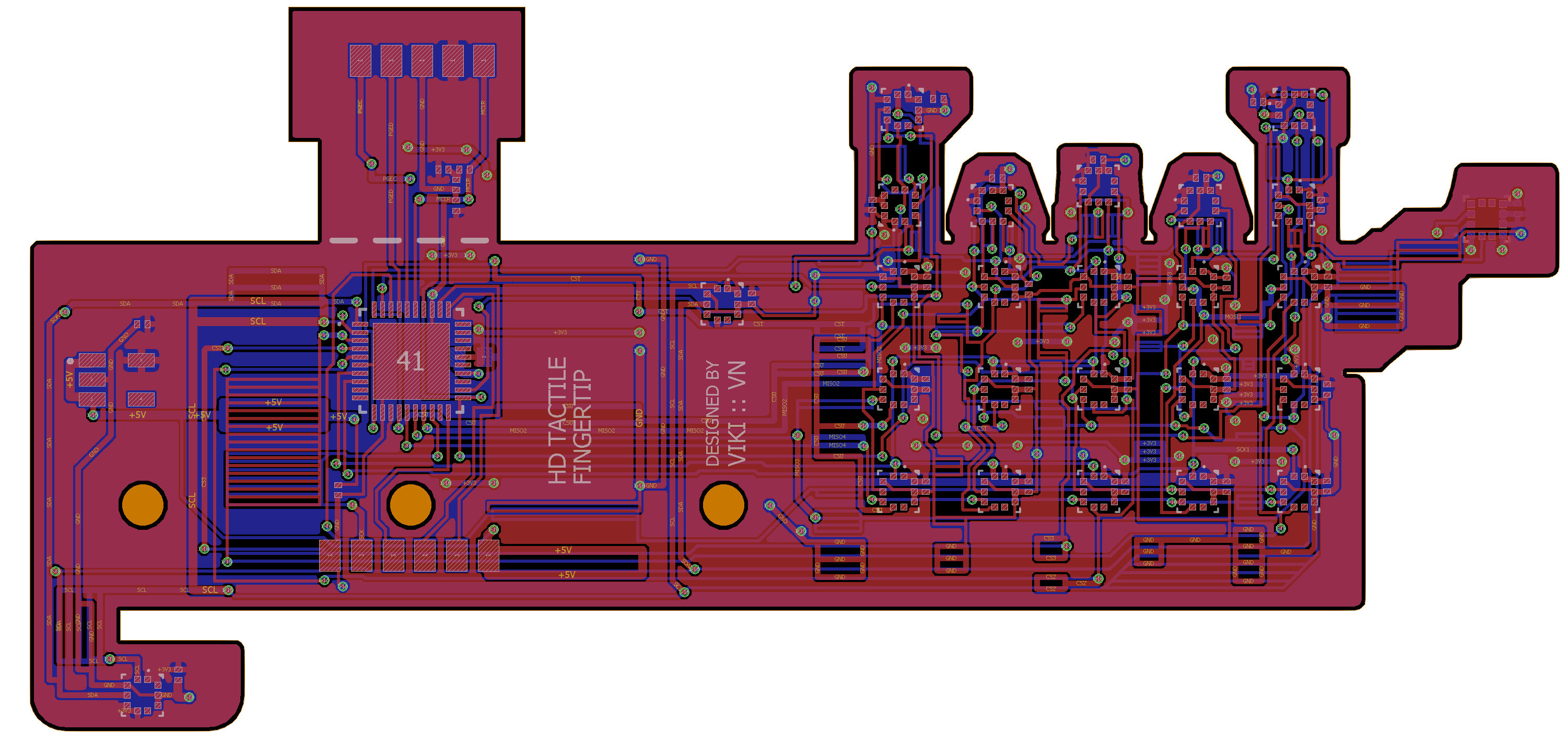
Figure 2: Board layout of the tactile fingertip module.
Fully Populated Tactile Fingertip Module
The tactile fingertip module is manufactured using 2-layer flexible PCB technology with a thickness of 0.11 mm. After fabrication, surface-mount technology (SMT) is used to populate the electronic components.
Figure 3 depicts the fully populated tactile fingertip flexible PCB placed next to a 10-cent coin, highlighting the size difference and the complexity of the design.
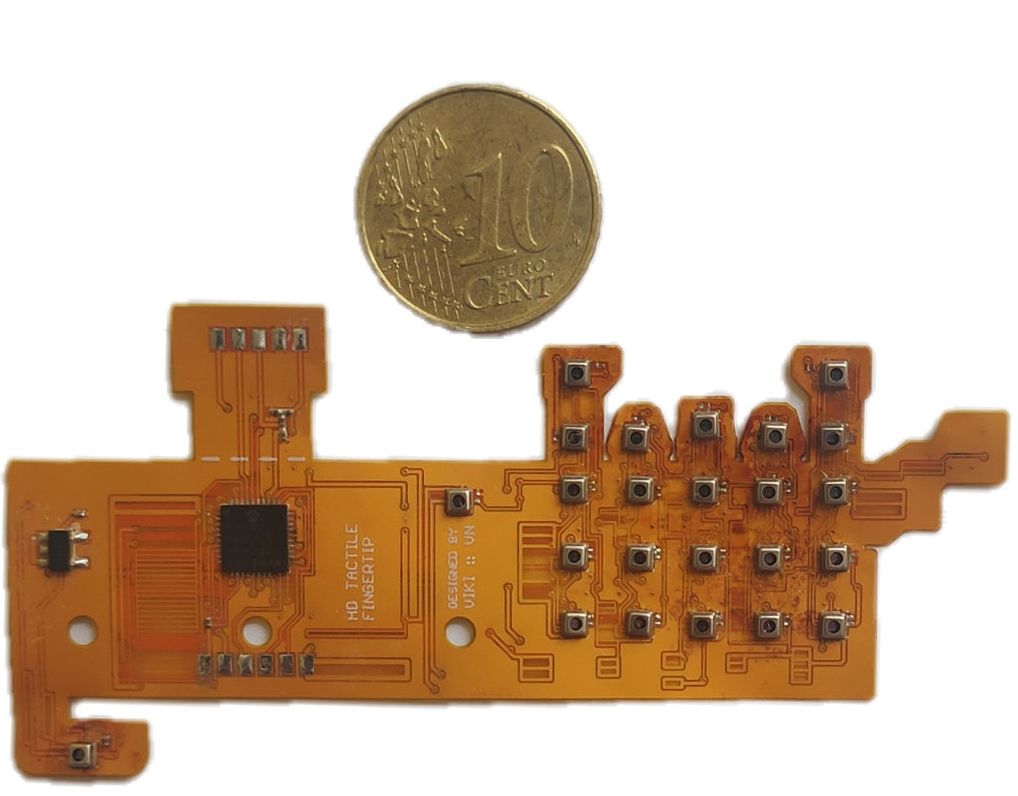
Figure 3: Fully fabricated and populated tactile fingertip module in flat form factor.
Origami
A technique called origami, a traditional Japanese art of folding paper to form intricate shapes, is applied here to transform the flat version of the flexible tactile fingertip module into a 3D shape resembling a fingertip. Although origami is a complex art and I don't have much expertise in it, I attempted a simplified version to apply the technique as best as I could. The figure below shows the fingertip after being folded using origami techniques, including both the top (Figure 4a) and bottom (Figure 4b) views. The bottom view represents the fleshy part of the fingertip.

Figure 4: Top (a) and Bottom (b) views of the tactile fingertip module folded into a 3D humanoid fingertip-like shape using origami techniques.
Tactile Fingertip Mounted on an Open-Source InMoov Robotic Hand

Figure 5: High-density tactile fingertip module mounted on an Open-Source InMoov humanoid robot hand [ref]. This demonstration is for illustrative purposes only. The silicone surface molding and supporting structure are still in progress. At this stage, only the electronics and basic sensor sampling have been tested successfully.
Open Source
Parts of this project have been open-sourced, including the tactile controller module and the initial evaluation version of the flexible tactile sensor module with two sensors. The currently available open-source repositories are listed below:
-
Tactile Controller Module
Source: https://github.com/neoviki/tactile.controller.module -
Flexible Tactile Sensor with Dual Sensors
Source: https://github.com/neoviki/flexible.tactile.sensing.module.dual.sensors
Flexible Tactile Sensor with Dual Sensors:
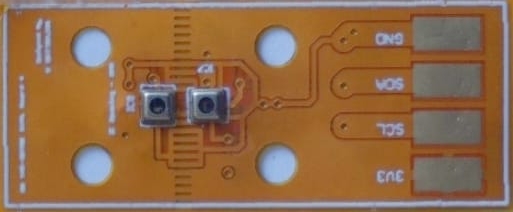
Figure 7
Figure 7, shows the flexible dual-sensor module developed to evaluate hysteresis behavior in MEMS barometric pressure sensors before continuing the development of the fingertip-shaped tactile sensor. After obtaining satisfactory results with minimum or no significant hysteresis from this evaluation module, the current fingertip sensor with 22 barometric sensors was developed, as shown in Figures 3 and 5.
This flexible dual-sensor module is mounted on a triangular prism-shaped base, with a silicone surface formed above the sensors to mimic the behavior of human skin. More details about the image, CAD model, sensor data, and related documentation will be published soon.
For now, the EDA design files, including the schematics and board layout, have been open-sourced and are available here: https://github.com/neoviki/flexible.tactile.sensing.module.dual.sensors
This flexible dual-sensor module is mounted on a triangular prism-shaped base, with a silicone surface formed above the sensors to mimic the behavior of human skin. More details about the image, CAD model, sensor data, and related documentation will be published soon.
For now, the EDA design files, including the schematics and board layout, have been open-sourced and are available here: https://github.com/neoviki/flexible.tactile.sensing.module.dual.sensors
Future Work
Further development is planned, including data collection, sensor evaluation, and communication firmware optimization. Future updates may include:
- 1. Detailed experimental results
- 2. Sensor performance analysis
- 3. Sampling-frequency and spatial-resolution evaluation
- 4. Additional schematics, data, and documentation