Tactile Trackpad – High-Density Pressure Sensing Module for Laptop and Gaming Input
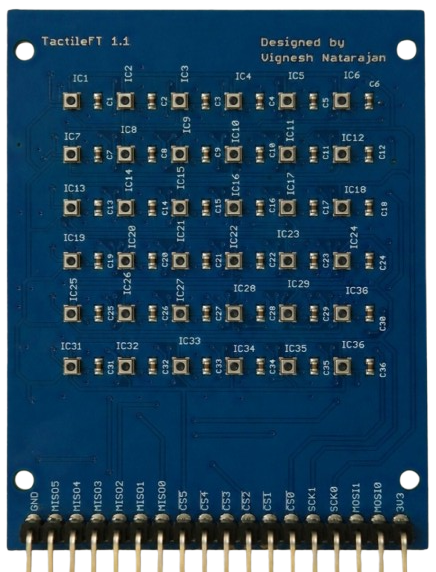
This tactile trackpad module features a high-density array of 36 MEMS barometric pressure sensors within a compact 50 × 65 mm form factor, enabling high-resolution tactile sensing. Although primarily designed as a tactile trackpad, the platform has potential applications in robotics, advanced human–machine interfaces, haptic research, and other pressure-sensing systems.
The primary objective of this work is to investigate the performance characteristics of dense pressure-sensor arrays, including achievable sampling frequency, spatial resolution, sensitivity, noise behavior, and potential hysteresis effects. The study also explores other factors that may influence measurement accuracy, responsiveness, and overall system performance in high-density tactile sensing configurations.
In addition to the tactile trackpad module, a dedicated controller board has been developed to interface with the sensor array and facilitate data acquisition. The controller is responsible for sensor communication, data collection, and transfer to a host system for further processing and analysis. The complete controller design, including schematics, PCB layout files, firmware, and related documentation, has been open-sourced and is available on GitHub
At present, only the basic functionality of the tactile sensing module has been validated, as development was temporarily paused due to commitments to other projects. Several aspects of the system remain under development, including the communication protocol, firmware enhancements, and the silicone surface molding required for the final tactile trackpad interface.
Figure 1: Shows the populated tactile sensing module with MEMS barometric pressure sensors.
The schematics, evaluation results, and additional details will be shared once testing and evaluation are complete. I’m documenting the progress so far, but since this is a personal project, I need to prioritize other commitments for the time being.
Possible Applications:
Possible applications of this tactile sensing module include robotics, haptic feedback systems, gaming interfaces, smart input devices, gesture-recognition systems, and other applications that require high-resolution tactile sensing.